BasicRL(3)-基于值的算法:Q-learning与DQN与改进
Q-learning
前面的Sarsa和TD算法之中, 我们的核心近似是
我们再度展开整个, 但并不是在Bellman方程之中,而是在Bellman最优方程之中
Q: 为什么要在Bellman最优方程之中展开呢?
A: 核心原因是想要把算法改造成off-policy的, 来配合后面的经验回放等技术, 提高采样效率
前面的SARSA算法是on-policy的, 也就是说, 采样的轨迹必须是由当前策略产生的, 这样才能保证的收敛性,所以Sarsa里面使用了-greedy策略, 以保证探索性; 但即使是这样, 其依然在采样效率上问题不小
- -greedy策略, 调整超参数是一个复杂的工作, 且必然带来浪费
- 无论是MC还是TD, 在大方差数据的情况下效果都有缺陷, 使得-greedy随时间探索性变低时, 可能还在采样到的局部最优里面,后续更无法跳出
- 在前期探索的数据, 想要将其保留下来, 后期继续使用(即采样比较贵,一个数据多用来更新几次策略), 但Sarsa无法做到
而我们在使用Bellman最优方程时, 实际上是在拟合函数, 注意这里与动作a解耦了!
因而这个拟合的函数是policy无关的(policy只影响a的分布, 但我们拟合的函数不再是期望而是最大值)
从而这个函数的拟合就可以变成off-policy的, 我们可以用任意策略去采样数据, 再把采样得到的数据丢到算法里面迭代更新这个
这就是所谓的Q-learning算法, 也是我们的DQN算法的基础
def q_learning(explore_policy):
Q = np.zeros((n_states, n_actions))
for i in range(n_episodes):
s = env.reset()
while True:
a = explore_policy(Q[s]) # 这里采用的探索策略可以是任意的,例如随机游走
s_, r, done, _ = env.step(a)
Q[s][a] = Q[s][a] + alpha * (r + gamma * np.max(Q[s_]) - Q[s][a])
s = s_
if done:
break
return Q
Deep Q-learning Network
从Q-learning进一步迭代到DQN的核心是把上面提到的的迭代更新用神经网络+梯度下降来做
也就是说, 我们把Q-learning的q[s][a]换成了了一个神经网络
Q: 为什么要这样做?
A: 当动作空间是离散或者不太大的时候,保留a, 即前面的“表格方法” q[s][a]是可以的。但如果a是连续的呢?针对这样的连续问题, 一种方法当然是离散化, 但这只是权宜之计; 更好的方法肯定是使用一个函数来近似, 这样就能把a完全参数化,对任意a我们都可以给出一个不错的值了
当然,由上面的讨论我们也可以发现, 这个神经网络实际上只做一个类似插值的工作,所以一般而言其结构是很简单的, 就是几层MLP, 例如
class DQNNet(nn.Module):
def __init__(self, n_states, n_actions, n_hidden=128):
super(DQNNet, self).__init__()
self.fc1 = nn.Linear(n_states + n_actions, n_hidden)
self.fc2 = nn.Linear(n_hidden, n_hidden)
self.fc3 = nn.Linear(n_hidden, n_actions) # Q(st, ai) for all ai in A
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
我们再举一个例子, 超级马里奥游戏
游戏的状态可以认为是当前屏幕画面(当然实际上会取几帧画面), 动作是上下左右跳等等
可以先用一个CNN来提取特征, 然后再用一个MLP来近似
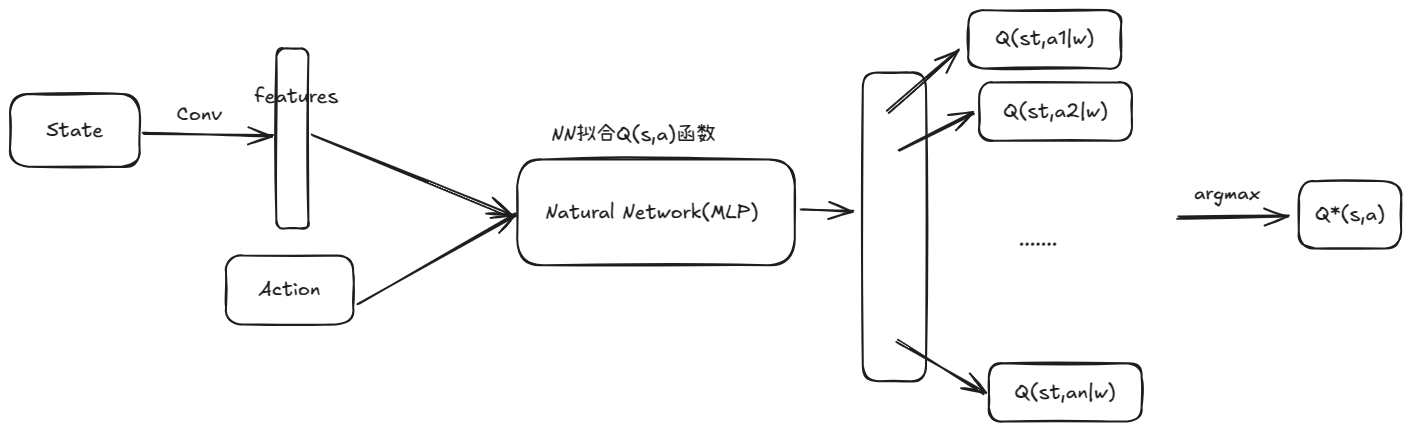
注意这个NN输出的是的向量, max是后续做的, 没有放在网络里面妨碍反向传播
这也是所谓"价值学习"的核心思想, 通过神经网络来近似, 从而实现对任意状态动作对的价值估计
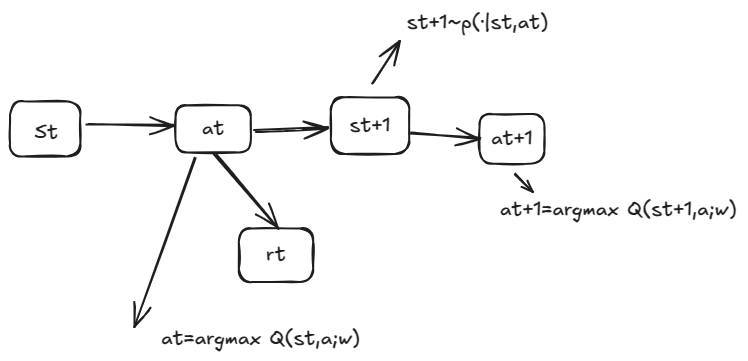
用DQN玩游戏的流程如下
训练DQN的时候, 常用的是TD算法
如何设计网络的Loss呢?我们要让Q逼近实际的Q, 这就是我们之前TD算法做的事情, ,式子中的就是神经网络的权重,这个Loss就是TD error的平方
完整的DQN算法训练部分如下
def DQN(explore_policy):
Q = DQNNet(n_states, n_actions)
optimizer = torch.optim.Adam(Q.parameters(), lr=0.01)
for i in range(n_episodes):
s = env.reset()
while True:
a = explore_policy(q) # 这里采用的探索策略可以是任意的,例如随机游走
q = Q(s,a)
s_, r, done, _ = env.step(a)
loss = F.mse_loss(q[a], r + gamma * torch.max(Q(s_,a)))
optimizer.zero_grad()
loss.backward()
optimizer.step()
s = s_
if done:
break
return Q
DQN的训练过程中, 关键的技术点是经验回放
经验回放: 之前提到的offline-policy的核心优势就在这里, 我们实际上可以进一步优化上面的训练过程, 将先前的的数据保存下来, 并在后续训练重用
具体来说, 我们可以采用一个大小为N的缓冲区, 每次训练的时候从中随机采样一部分数据,使用类似深度学习的mini-batch的想法, 这样可以有效地减小数据的相关性, 从而提高训练的效率
Q: 减小数据的相关性为什么能提高训练效率呢?
A: 论文这么说的, 算是一个实验结果, 也可以去看点理论分析
Q: N一般多大?
A: 一般而言, 在10万到100万量级都是可以的
一个示例的经验回放池
Transition = namedtuple('Transition',
('state', 'action', 'next_state', 'reward'))
class ReplayMemory(object):
def __init__(self, capacity):
self.memory = deque([], maxlen=capacity)
def push(self, *args):
"""Save a transition"""
self.memory.append(Transition(*args))
def sample(self, batch_size):
return random.sample(self.memory, batch_size)
def __len__(self):
return len(self.memory)
其他优化的技术:
n-step: 之前我们提到的TD算法是一步的, 也就是说, 我们的更新是基于一个的数据, 但我们也可以考虑多步的TD算法, 例如n-step TD, 这样可以进一步提高训练的效率
优先经验回放:有些经验只是其他经验的重复, 也有些经验是比其他经验更重要的。如何衡量一条经验的重要度? 我们可以用TD error来衡量, err越大, 模型对其越“不熟”, 也就越重要
一般而言有两种优先级设定方法:
- , 是一个小量防止为0
- , 其中rank(t)是t在经验池中的排序
使用优先经验回放时,还需要注意对应步长的变化, 要维持先前收敛的稳定性质, 我们需要针对重要性调整学习率,重要性大,采样多,步长小; 重要性小,采样少,步长大, 一般取, n是一个超参数,大致让中间重要的项的在1左右, 这样大的项指数减小,小的项指数增大
DQN高估问题与Double DQN, Dueling DQN
前面的DQN算法有一个问题, 就是对Q的高估
高估是怎么产生的? 来源于max, 也就是自举的那个操作:
我们知道max不是一个无偏的操作, 在为实际最优的时候, 上式成立, 而对于并不是最优的时候, 右式的迭代更新会使得比实际值大,想象, 是一个随机变量的误差, 的分布就会比的分布更偏大
如果max是均匀的,实际上也不是什么问题,因为我们实际上要的是策略, 是由决定的, 也就是决定策略的是不同动作的相对值
但很可惜的是, max不是一个均匀放大的操作, 由于我们是采样更新的,被采样得更多对, 偏大得就会更多, 这最后会影响我们的策略
有两种解决方法:
- target network
先讲target network, 我们引入一个新的网络(实际上是原始DQN网络的COPY),它和的结构相同,但参数不同(更新频率不同)
在计算TD target和选择的时候, 我们使用来计算,其他时候用计算, 但更新的频率是比较低的, 例如每1000步更新一次(将重新赋值给),从而减少自举带来的高估。也就是计算用,更新在上更新
- double DQN
而对于double DQN, 它大体思想类似target network, 只基于一个观察改动了一个小地方
我们在选择的时候, 用来计算,这样可以减少高估
为什么?,其中是下的最优动作
而后续的一个更好的改进是Dueling DQN
它引入了一个重要的东西叫优势函数
Dueling DQN并没有在公式上做太大的改进, 而是改进了网络结构
其捕获的关键点是, 我们得到的收敛时, 和可能没有收敛, 而是一个偏大, 一个偏小
要让自举带来的高估问题减小甚至消失, 我们要让也收敛
这样设计网络
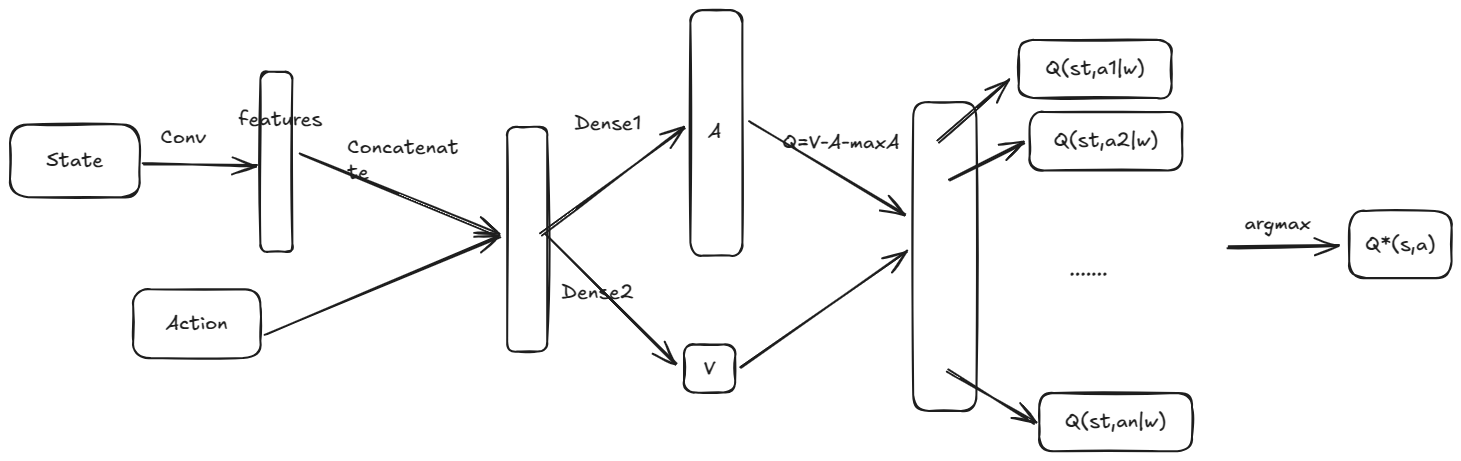
这里将中间的MLP表示Q分成了两个MLP, 一个输出n维表示A, 一个输入一个标量表示V, 最后再合并
关键就在于这个的操作, 这个依赖于当策略收敛(到始终选择最大Q的a)的时候, =0, 而在其他时候, 是一个负数, 从而减小了高估
实验表明的一个结论是把上式换成效果更好, 但目前还不知道为什么
实验表明, Dueling DQN的减少高估的效果要优于Double DQN, Double DQN的效果要优于target network
但Dueling DQN也能同时和Double DQN结合, 也就是Double Dueling DQN, 这样效果更好
伪代码如下
from torchrl.data import ListStorage, PrioritizedReplayBuffer
class DuelingDQNNet(nn.Module):
def __init__(self, n_states, n_actions, n_hidden=128):
super(DuelingDQNNet, self).__init__()
self.fc1 = nn.Linear(n_states, n_hidden)
self.fc2 = nn.Linear(n_hidden, n_hidden)
self.fc3 = nn.Linear(n_hidden, n_actions) # Q(st, ai) for all ai in A
self.fc4 = nn.Linear(n_hidden, 1) # V(st)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
A = self.fc3(x)
V = self.fc4(x)
Q = V + A - A.mean()
return Q
def double_dueling_dqn_collect_experience(explore_policy)->PrioritizedReplayBuffer:
# 初始化经验池
experience_pool = PrioritizedReplayBuffer(alpha=0.7, beta=0.9, storage=ListStorage(10000))
s = env.reset()
a, r, s_, done = explore_policy(Q, s)
while True:
experience_pool.push((s, a, r, s_, done))
if done:
break
s = s_
a, r, s_, done = explore_policy(Q, s)
def double_dueling_dqn_train():
Q = DuelingDQNNet(n_states, n_actions)
Q_target = DuelingDQNNet(n_states, n_actions)
optimizer = torch.optim.Adam(Q.parameters(), lr=0.01)
experience_pool = double_dueling_dqn_collect_experience(explore_policy)
T = 100 # 更新Q_target的频率
for i in range(n_episodes):
s = env.reset()
batch = experience_pool.sample(batch_size)
loss = 0
for s, a, r, s_, done in batch
q = Q(s,a)
q_target = Q_target(s_,a)
loss = F.mse_loss(q[a], r + gamma * q_target)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if i % T == 0:
Q_target.load_state_dict(Q.state_dict())
return Q