vgg
内存占用大,推理慢(深),但效果好
卷积层参数小,全连接层最大问题是参数太大过拟合
所以最后一层全连接是很大的问题
大参数还有内存 bound 的问题
NiN
用卷积层替代全连接
两个 1*1 卷积无 padding, stride1 起全连接的作用(只做通道混合)
每个卷积后面跟两个全连接作为 NiN block
交替使用 NiN 块和 stride = 2 的 maxpooling 逐步减小高宽和增大通道数
最后使用全局平均池化得到输出(通道数 = 分类个数)
打印结构:
for layer in net : X = layer ( X ) print ( layer . __class__ . __name__ , "output shape:\t" , X . shape ) 超级宽的 hidden layer: 非常容易过拟合
泛化性提高-> 收敛变慢
全连接的方案: 非常强, 收敛很快
GoogLeNet
inception 块: 不做选择, 全都要
output = output1 + o2 + o3 + o4
o1 = conv1x1
o2 = conv1x1 + conv3x3, padding 1
o3 = conv1x1 + conv3x3, padding 1 + conv5x5, padding 2
o4 = 3x3 maxpool, padding 1
四条路径从不同层面抽取信息, 在输出通道合并 concatenation
四条路径分配不同的通道数(你认为那种模式哪个通道的信息更重要)
降低通道数来控制模型复杂度
googlenet 5 段, 9 个 inception 块
不降低维数的 1x1 卷积就是通道融合
第一个 stage 总是把通道数拉上去, 高宽减下去, 先筛选出足够多的特征
v2: batch normalization
v3: 5x5-> 3x3, 5x5-> 1x7+7x1(单长和单宽)
v4: 残差连接
优点是模型参数少, 计算复杂度低
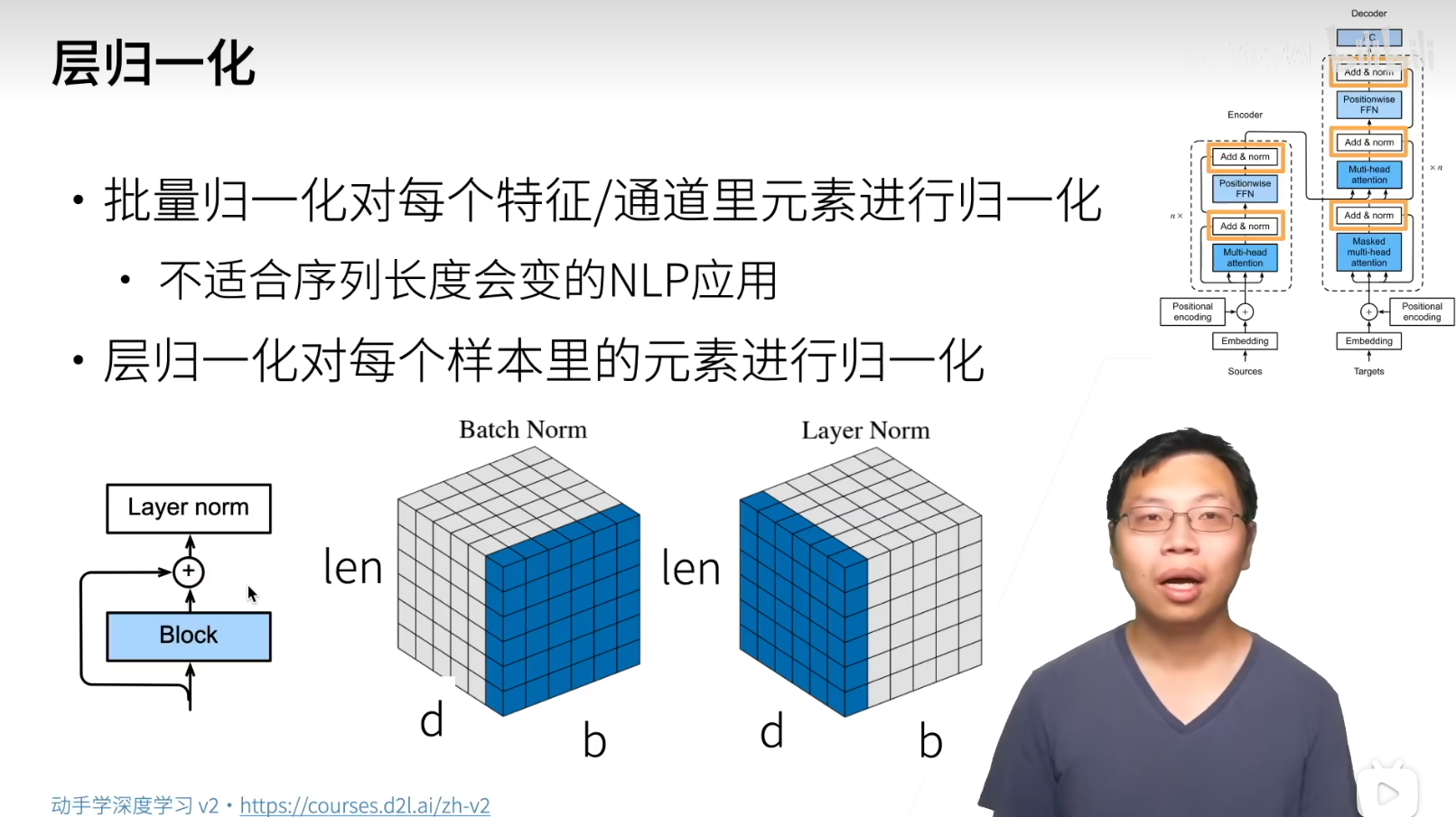
批量归一化
损失出现在最后, 后面的层训练快
反向传播: loss 在顶层, 数据在最底部, 底部的层(前面的层)训练慢, 底部层一变, 所有都得跟着变
导致离 loss 近的后面层需要重新学习多次, 导致收敛变慢
有没有方法让学习前面层的时候避免变化后面层?
批量归一化: 将分布固定, 来让输出模式稳定一些, 固定小批量的均值和方差
正则化, 将数据分布固定为 N ( 0 , 1 ) N(0,1) N ( 0 , 1 )
对于全连接, 作用 在激活函数前面 , 作用在特征维度
对卷积, 作用在通道维
效果太好了, 原始论文觉得是减少内部协变量转移, 后续发现 可能就是等效于在每个小批量里面加入噪音来控制模型 , 均值近似于随机偏移, 方差近似于随机缩放
因此没必要和丢弃混合使用
加速收敛(模式更稳定之后可以把 lr 调得更大), 但一般不改变模型精度
根据内存挑 batch size, 不能太大也不能太小, 然后调学习率和 epoch
ResNet
残差的重要性不必多言
深网络必有残差思想
新硬件
DSP 主要做数字计算处理长指令, FPGA 可编程阵列
工具链质量良莠不齐, 一次 "编译" 需要很久
AI ASIC: Google TPU eg
核心 systolic array, 专门做大矩阵乘法 2d 计算单元(PE)阵列, 卷积换成矩阵乘法
一般的矩阵乘: 切开和填充匹配 SA 大小
批量输入来降低延时, 其他硬件单元来处理别的 NN 操作子, 例如激活层
多卡并行
数据并行(切割小批量), 模型并行(切割模型, 适用于模型太大的时候),
all reduce: 将所有 gpu 的结果放到一个 gpu 上, 然后相加, 加完再复制回其他 gpu
nn.parallel.scatter
nn.DataParallel
多卡时也要相应的加大 batchsize 和 lr
大 batch size 在小模型上会采出重复样本导致浪费和一定程度上的过拟合
分布式
GPU 和 GPU 通信快, 和 CPU 通信慢, 和交换机网卡更慢
解法是把 parameter server 尽量从 cpu 搬到 gpu 上
这样简单的 parameter 迁移分配就能在 gpu 本地完成, 不涉及到 cpu 的 copy(感觉像 DMA)
每个 worker 拿参数, 复制到 GPU 上, 每个 GPU 算自己的梯度, GPU 梯度求和, 传回服务器, 再更新, 回发
类似 mr, server mapper, 本地 gpu 完成计算和 combine, 在 server reduce
同步 SGD, 每个 worker 同步计算一个批量
所以需要调 batch size, 来针对并行省下的时间与通信开销做 trade off
实践:
大数据集
好的 GPU-GPU 和机器-机器带宽
高效的数据读取和预处理
好的计算(FLOP)和通信(model size)比 Inception > ResNet > AlexNet 足够大的 batch size
高效优化算法(因为 batch size 变大了, 如何适配)
更复杂的分布式有异步, 模型并行
一般 N 个类, batch size 差不多到 10N 再往上就不太能 fit 了
数据增广
已有数据集让他有更多多样性
在语言里面加背景噪音
改变图片的亮度, 颜色, 形状
一般的做法: 原始数据在线生成, 随机增强
测试不做增强
翻转:
左右翻转, 上下翻转
切割, 随即高宽比, 随机大小, 随机位置
其他:
高斯模糊
锐化
变形
滤镜
马赛克(相当于遮挡, 逼着去看全局)
...
从实际部署的场景反推需要什么样的增强
异常检测, 偏斜数据, 重采样, 增广
mixup 增广: 有效但不知道为什么
torchvision.transforms
微调(迁移学习)
标注一个数据集很贵
希望在大数据集上做好的东西, 能以小代价迁移到小数据集上
神经网络分层两块: 特征提取+线性分类
dl: 让特征提取变得可以学习, 而不是人来提取特征
训练:
源数据集远复杂于目标, 微调效果更好
固定一些层, 固定底部一些层的参数, 不参与更新
低层次的特征更加通用
小 trick, 微调的时候最后一层用大学习率, 前面用小的
迁移的也不能差太大, 否则效果很可能不够好
目标检测
bounding box
锚框: 提出多个被称为锚框的区域, 预测每个框里面是否有关注的物体, 如果是, 预测锚框到真实框的偏移
交并比 IoU
每个锚框是一个训练样本, 要么标注成背景, 要么关联一个真实边缘框
可能生成大量锚框, 导致大量的负类样本
选择合适的锚框(赋予锚框标号):
先生成一堆框, 之后算锚框 i 和真实框 j 的 IoU, 在 i, j 之中找最大的, 就得到了一组锚框和真实框的对应
然后从集合中剔除这个锚框 i 和边缘框 j(删除矩阵行列), 再找下一组
重复直到真实框为空, 这就是正类样本, 剩下的锚框挑一些作为负类样本
锚框生成: 一种固定切分画格子
NMS 非极大抑制: 合并相似的预测框
选中非背景类的最大预测值
去掉所有和它 IoU 大于阈值的预测
重复直到所有预测要�么被选中, 要么被去掉
生成锚框的另一种示例方法
宽度 w s r ws\sqrt r w s r h s / r hs/\sqrt{r} h s / r
对给定几组 ( s , r ) (s,r) ( s , r )
算法的核心之一: 如何生成高质量锚框
锚框到偏移的算法: 多种多样
autogluon
工业界很少用模型融合和测试增强, 计算代价过高
通常固定模型超参数, 简单模型, 精力花在提升数据质量和加入的新数据
RCNN:
启发式搜索算法选择锚框
预训练模型对每个锚框抽取特征
训练一个 SVM 对类别分类
训练一个线性回归来预测偏移
RoI pooling
锚框均匀分割 mxn, 输出每块里面的最大值
不管锚框多大, 总是输出 mn
Fast RCNN
不再对每一个锚框抽取特征
而是将所有的锚框丢进 cnn(输入里面对应的映射区域), 一次 CNN 对整个图片抽取
Faster RCNN: 使用区域提议网络代替启发式搜索来获得更好的锚框
2-stage
Mask RCNN 如果有像素级别的编号, 给每个像素做预测, 用 FCN 利用信息
Faster RCNN: 速度非常慢, 精度高
SSD: single stage
基础网络抽特征, 多个 conv 减半高宽
每段都生成锚框
对每个锚框预测类别和边缘框
yolo: 追求快
ssd 锚框大量重叠, 浪费计算
均匀切分 SxS 个锚框, 每个锚框预测 B 个边缘框
后续有许多微调和改进
工业常用
非锚框: 例如 central net
语义分割
像素级分类
应用: 背景虚化, 路面分割
另一个相近的概念: 实例分割
数据集: 输入是图片, label 也是图片(每个像素的值就是 label)
crop: 怎么做, 对输入进行裁剪, 在 label 上也要相对应的裁剪
拉伸也是需要特殊处理的
旋转? 一种是可以加一个 label 是旋转角度, 另一个是可以在转完的斜框上涨再画一个大框框住斜框
人像: 难点在光照, 阴影和背景
人像语义分割: pretrain model 已经很成熟
转置卷积
卷积的问题:不能很有效的增加高宽
类似语义分割这种-> 卷积不断减小高宽, 会影响像素级别的输出
Y [ i : i + h , j : j + w ] + = X [ i , j ] × K Y[i:i+h, j:j+w] += X[i,j] \times K Y [ i : i + h , j : j + w ] + = X [ i , j ] × K
增大输入高宽
为什么是转置卷积:
卷积等价于矩阵乘法 Y = V X Y = VX Y = V X Y = V T X Y = V^{T}X Y = V T X
nn.ConvTranspose2d
卷积是下采样, 卷积是上采样
转置卷积与线性插值: 可以用线性插值作为转置卷积核的初始值
FCN
全连接卷积神经网络
用 dl 做语义分割的最早工作
用转置卷积替换 CNN 最后的全连接层+全局池化
先过 1x1 conv 压缩通道
再过转置卷积拉大图片, 得到像素级别的切分
思想是每个像素的的 label 信息这个 feature 应该存在 channels 里面
net = nn.Sequential(*list(pretrained_cnn.children()))[:-2]
可以用双线性插值的矩阵初始化转置卷积层的 kernel
loss: 由于每一个像素都有了 label
所以在矩阵上做均值再 cross_entropy
样式迁移
基于 CNN 的样式迁移
核心思想: 训练一个 CNN, 将他作用在内容图片上得到输出, 在样式图片上得到输出
而输出图片在内容层上的输出和内容图片在内容层上的输出相近(content loss)
输出图片在样式层上的输出和样式图片在样式层上的输出相近(style loss)
训练的不是 CNN, 而是输入网络的的“输出图片”
哪些层是“style layer”, 哪些是 "content layer"?
样式: 最小, 中间和上层, 较均匀
内容: 偏末尾的层, 靠近 loss
内容损失可以是简单的 MSE
样式损失? 通道内部和之间的统计分布, 认为是样式
分布匹配, 一阶平均值, 二阶协方差, 用二阶就还不错
最后: tv_loss, 不要有噪点, 每个像素和周围像素不要差太多, 计算每个与周围的 MSE 再求平均
这几个损失如何加起来? 加权平均, 权值是超参数
style 一般更重要, 例如 content:style:tv=1:1000:10
这几个超参数的调整是训练几次之后, 观察三种 loss, 调到差不多大小得出的
不更新: y.detach()
卷积只作为抽特征
麻烦: 后续技术, GAN, 使用 CNN 接收随机输入生成图片等
序列模型
标号和样本是一个东西: 自回归模型 t-k ~ t-1 -> t
方法 A: 马尔可夫假设: 假设当前数据只和 k 个过去数据点相关
方法 B: 潜变量模型: 引入潜变量 h t h_t h t x t = p ( x t ∣ h t ) x_t = p(x_t|h_t) x t = p ( x t ∣ h t ) h t = f ( x 1 , . . . x t − 1 ) h_t = f(x_1,...x_{t-1}) h t = f ( x 1 , ... x t − 1 )
那我们就可以将预测拆成两步:
h t = M o d e l 1 ( h t − 1 , x t − 1 ) h_t = Model1(h_{t-1}, x_{t-1}) h t = M o d e l 1 ( h t − 1 , x t − 1 ) x t = M o d e l 2 ( h t , x t − 1 ) x_t = Model2(h_t, x_{t-1}) x t = M o d e l 2 ( h t , x t − 1 )
文本预处理
预处理的核心是分词
GPU 上存算的是 token 索引而非字符串
语言模型:
给定文本序列, 估计联合概率
做预训练模型
生成文本
判断多个序列之中哪个更常见
简单方法: 基于计数建模
序列很长的时候, 由于文本量不够大, 可能 n ( x 1 , . . . x t ) ≤ 1 n(x_1,...x_t)\le 1 n ( x 1 , ... x t ) ≤ 1
使用马尔可夫假设缓解, n 元语法假设, 假设只和前 n 个词相关
以二元为例, 则有 p ( x 1 , x 2 , x 3 , x 4 ) = n ( x 1 ) x 1 n ( x 1 , x 2 ) n ( x 1 ) n ( x 2 , x 3 ) n ( x 2 ) n ( x 3 , x 4 ) n ( x 3 ) p(x_1,x_2,x_3,x_4) = \frac{n(x_1)}{x1} \frac{n(x_1,x_2)}{n(x1)} \frac{n(x_2,x_3)}{n(x2)} \frac{n(x_3,x_4)}{n(x3)} p ( x 1 , x 2 , x 3 , x 4 ) = x 1 n ( x 1 ) n ( x 1 ) n ( x 1 , x 2 ) n ( x 2 ) n ( x 2 , x 3 ) n ( x 3 ) n ( x 3 , x 4 )
RNN
更新隐藏状态: h t = ϕ ( W h h h t − 1 + W h x x t − 1 + b h ) h_t = \phi (W_{hh}h_{t-1} + W_{hx}x_{t-1} + b_h) h t = ϕ ( W hh h t − 1 + W h x x t − 1 + b h )
输出: o t = ϕ ( W h o h t + b o ) o_t = \phi (W_{ho}h_t + b_o) o t = ϕ ( W h o h t + b o )
训练的模型: W h h , W h x , W h o , b h , b o W_{hh}, W_{hx}, W_{ho}, b_h, b_o W hh , W h x , W h o , b h , b o
如果没有 W h h h t − 1 W_{hh}h_{t-1} W hh h t − 1
loss 设计: 困惑度 perplexity
把输出看成是词典大小为 label 数量的话, 可以用交叉熵, 然后对整个句子取平均
但实际不是用这个, 而是用 exp(平均交叉熵)
梯度裁剪: 在 T 个时间步上的梯度, 反向传播 O(T)矩阵乘法, 梯度爆炸
如果梯度长度超过 θ \theta θ θ \theta θ
g × m i n ( 1 , θ ∣ ∣ g ∣ ∣ ) → g g \times min(1, \frac{\theta}{||g||}) \to g g × min ( 1 , ∣∣ g ∣∣ θ ) → g
更多的 RNN:
1 对多: 文本生成
多对 1: 文本分类
多对多: 问答, 机器翻译
多对多: tag 生成
GRU&LSTM
对于一个序列, 记住相关观察需要 更新门(能关注的机制) + 重置门(能遗忘的机制)
R t = σ ( X t W x r + H t − 1 W h r + b r ) R_t = \sigma (X_tW_{xr} + H_{t-1}W_{hr} + b_r) R t = σ ( X t W x r + H t − 1 W h r + b r )
Z t = σ ( X t W x z + H t − 1 W h z + b z ) Z_t = \sigma (X_tW_{xz} + H_{t-1}W_{hz} + b_z) Z t = σ ( X t W x z + H t − 1 W h z + b z )
候选隐状态
H c a n d ( t ) = t a n h ( X t W x h + ( R t ⊙ H t − 1 ) W h h + b h ) H_{cand(t)} = tanh(X_tW_{xh} + (R_t \odot H_{t-1})W_{hh}+b_h) H c an d ( t ) = t anh ( X t W x h + ( R t ⊙ H t − 1 ) W hh + b h )
R t R_t R t [ 0 , 1 ] [0,1] [ 0 , 1 ]
H t = Z t ⊙ H t − 1 + ( 1 − Z t ) ⊙ H c a n d ( t ) H_t = Z_t \odot H_{t-1} + (1 - Z_t) \odot H_{cand(t)} H t = Z t ⊙ H t − 1 + ( 1 − Z t ) ⊙ H c an d ( t )
隐藏层多大? 例如 128,256, 长序列就 1024
实际不考虑 RNN, 一般 GRU/LSTM
超过 100,1000 这样的长度量级, 考虑 Attention
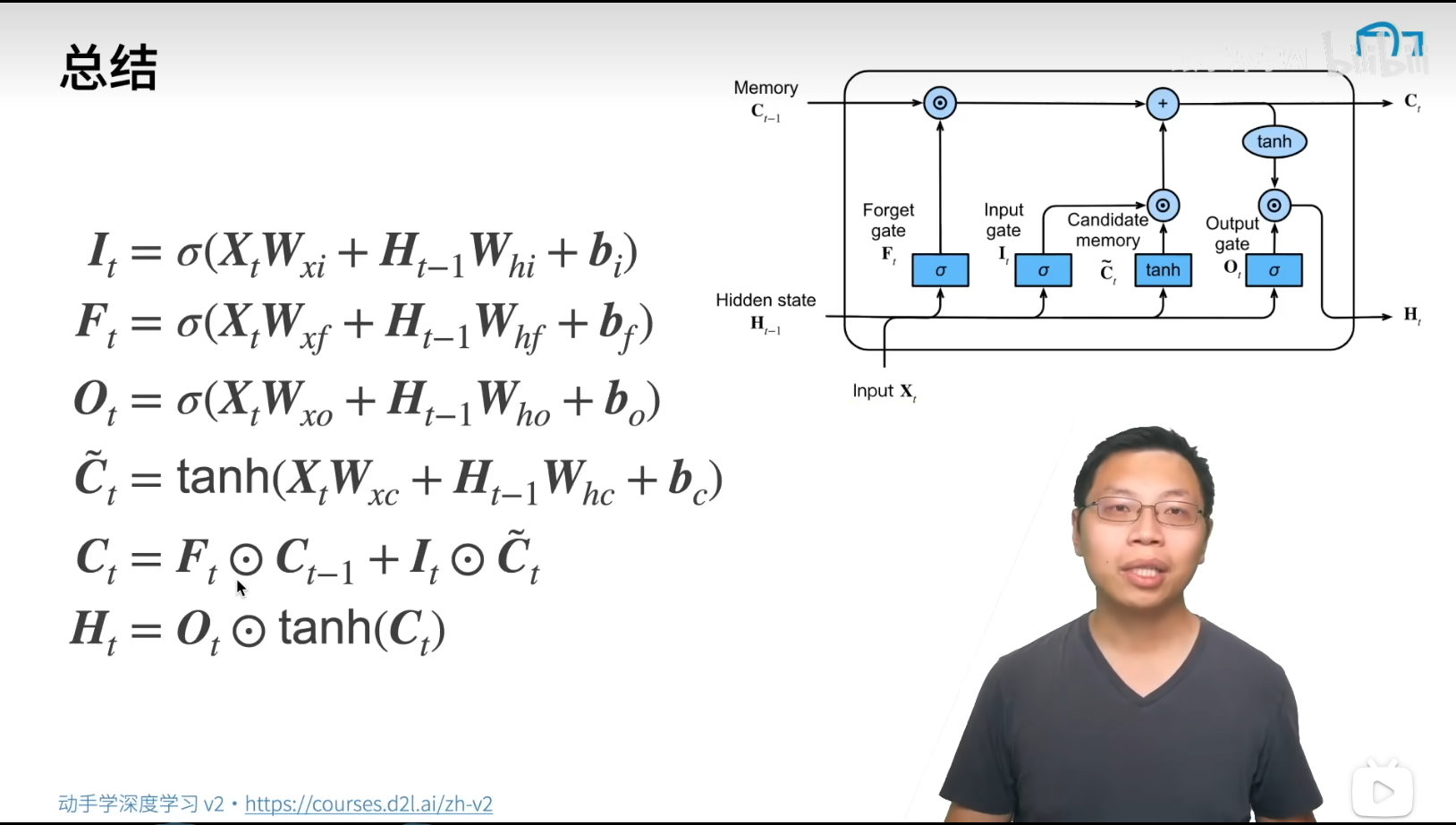
LSTM
忘记门: 将值朝 0 减少
输入门: 决定是不是忽略输入
输出门: 决定是不是使用隐状态
更深(多个隐藏层)的 RNN, 更多的非线性性
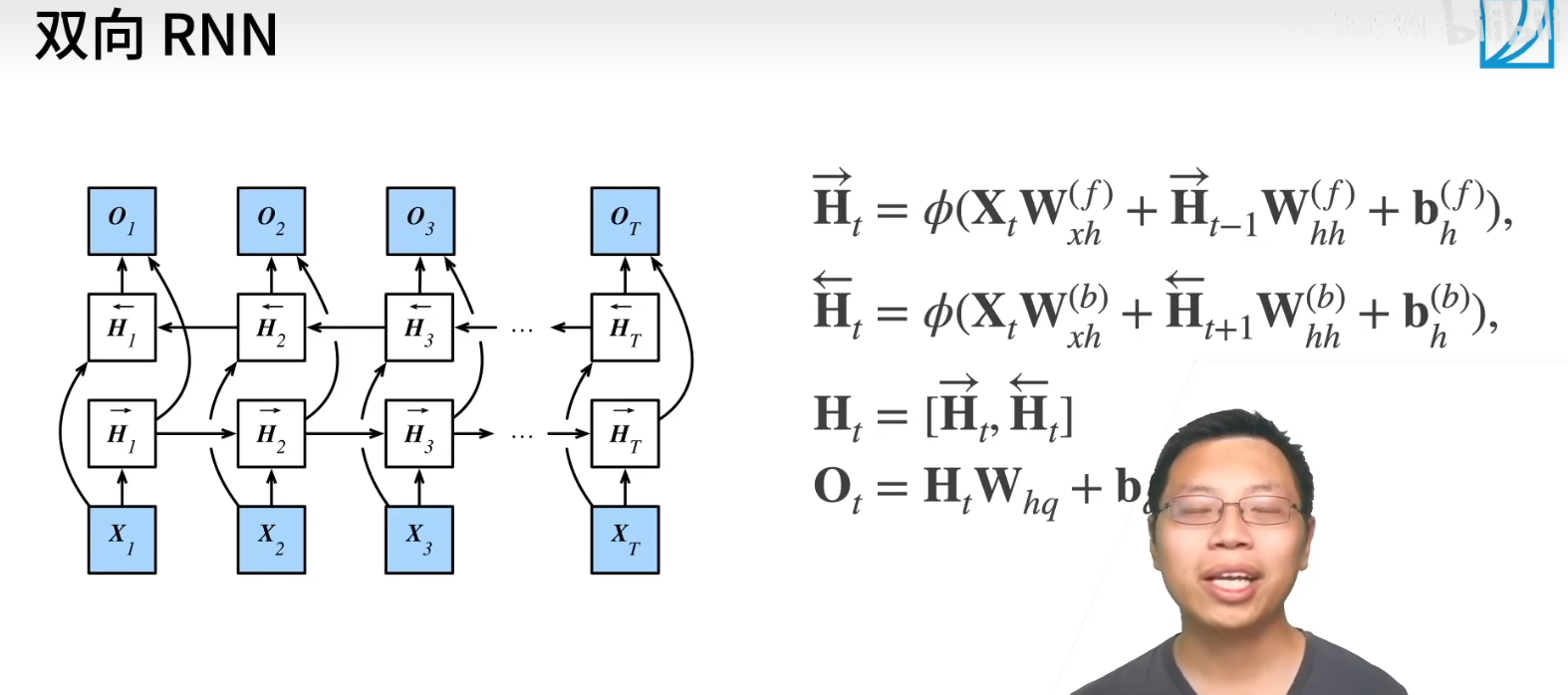
双向 RNN
一个前向 RNN 隐层
一个反向 RNN 隐层
合并两个得到输出
output 是前向和反向的共同贡献
推理怎么推? 非常不适合做推理, 几乎不能推
主要作用: 对句子做特征提取, 填空, 而不是预测未来
输入需要定长(为了以 batch 的形式读入)
如何做不定长的? 填充或者截断, 例如翻译
encoder-decoder 架构
encoder: 将输入编程成中间表达形式(特征)
decoder: 将中间表示解码成输出
encoder 将 state 传给解码器做输入
seq2seq
encoder 是一个 RNN, 可以双向
decoder 是另一个 RNN
编码器是没有输出的 RNN
encoder 最后时间步的 hidden state 作为 decoder 的初始 hidden state
训练, 训练时 decoder 用目标句子作为输入
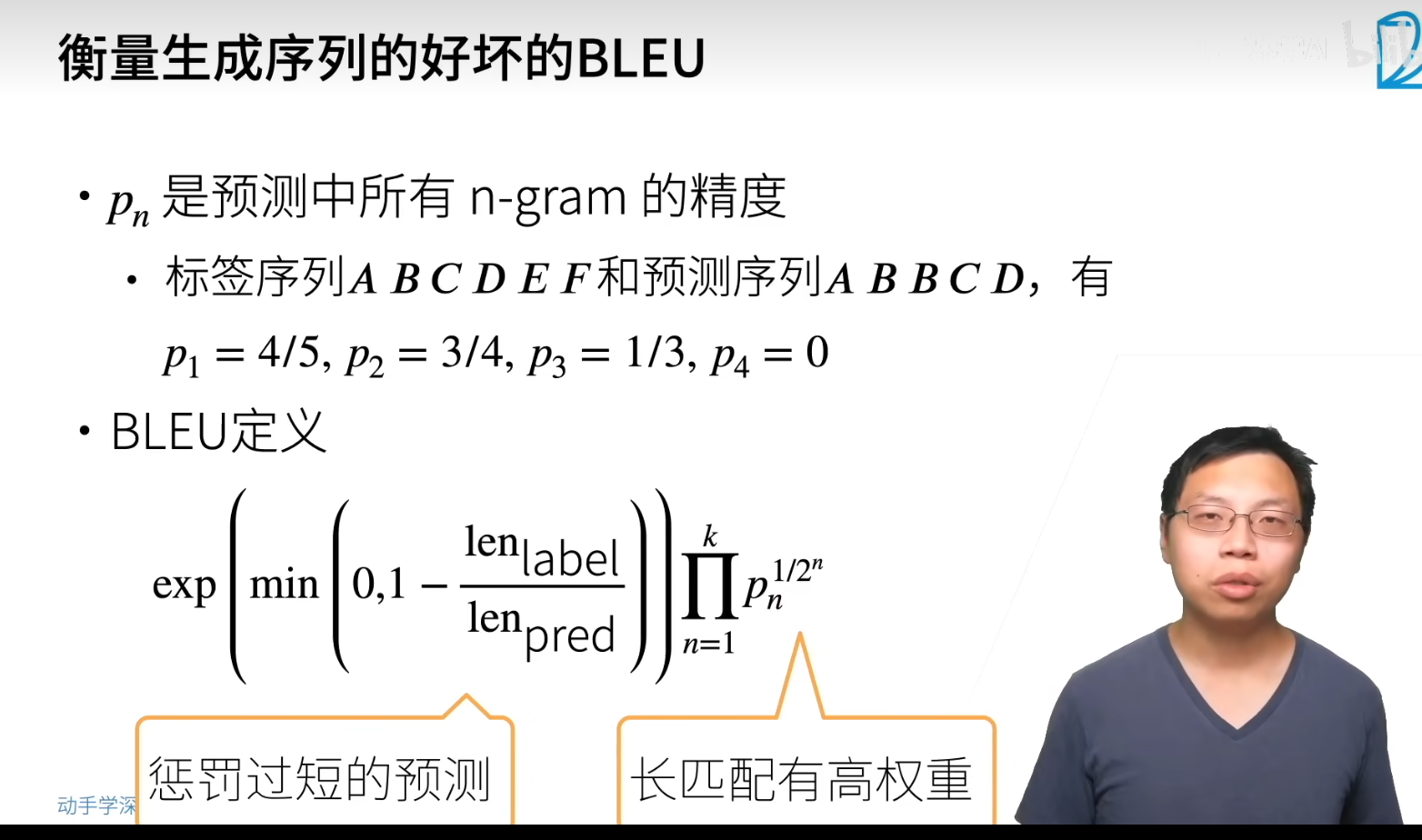
衡量生成序列的好坏: BLEU
exp 项: 防止 pred 句子长度过短偷懒提高精度
BLEU 越大越好
seq2seq: 从一个句子生成另一个句子
sequence_mask:在序列中屏蔽不相关的项(padding)
拓展 softmax 来屏蔽不相关的预测(padding 对应的 output)
预测
最开始输入 <bos>, 然后 RNN 每次输出作为下一个的输入
seq2seq 可以纯 transformer
束搜索
beam search
seq2seq:用当前时刻预测概率最大词输出(贪心)
但贪心很可能不是最优的
暴搜指数级增长肯定不行
bin search: 对每个时刻, 保存最好的 K 个序列
每一次新预测会对 k 的 kn 个可能的下一个序列之中再调最好的 k 个
如何选择 "最好"?
单纯的概率乘总是倾向于选择短句子, 需要给长句子加权
每个候选的最终分数 1 L α l o g p ( y 1 , . . . y L ) \frac{1}{L^{\alpha}}logp(y_1,...y_L) L α 1 l o g p ( y 1 , ... y L ) α = 0.75 < 1 \alpha=0.75 < 1 α = 0.75 < 1
Attention
卷积, 全连接, 池化只考虑“不随意”的线索
注意力机制显式地考虑随意线索
随意线索被称为查询 query
每个输入是一个值 value 和不随意线索 key 的对
通过注意力池化层来对有偏向性的选择某些输入
非参(不需要任何先验参数)注意力池化层
给定数据(环境, 先验, context) ( x i , y i ) (x_i,y_i) ( x i , y i )
查询: 给定一个 x, 求对应的 y = f ( x ) y=f(x) y = f ( x )
注意力: f ( x ) = ∑ i α ( x , x i ) y i f(x)=\sum_i \alpha(x,x_i)y_i f ( x ) = ∑ i α ( x , x i ) y i α ( x , x i ) \alpha(x,x_i) α ( x , x i )
最简单的方法: 平均池化, f ( x ) = 1 n ∑ i y i f(x)=\frac{1}{n}\sum_i y_i f ( x ) = n 1 ∑ i y i
更好的方案是 60 年代的 Nadaraya-Watson 核回归
f ( x ) = ∑ i K ( x − x i ) ∑ j K ( x − x j ) y i f(x)=\sum_{i} \frac{K(x-x_i)}{\sum_j K(x-x_j)}y_i f ( x ) = ∑ i ∑ j K ( x − x j ) K ( x − x i ) y i
高斯核 K ( u ) = 1 2 π e x p ( − u 2 2 ) K(u)=\frac{1}{\sqrt{2\pi}}exp(-\frac{u^2}{2}) K ( u ) = 2 π 1 e x p ( − 2 u 2 )
f ( x ) = ∑ i s o f t m a x ( − 1 2 ( x − x i ) 2 ) y i f(x)= \sum_{i} softmax(-\frac{1}{2}(x-x_i)^2)y_i f ( x ) = ∑ i so f t ma x ( − 2 1 ( x − x i ) 2 ) y i
参数化:
再引入可以学习的 w
f ( x ) = ∑ i s o f t m a x ( − 1 2 ( ( x − x i ) w ) 2 ) y i f(x)= \sum_{i} softmax(-\frac{1}{2}((x-x_i)w)^2)y_i f ( x ) = ∑ i so f t ma x ( − 2 1 (( x − x i ) w ) 2 ) y i
相较非参的注意力, 变得更不平滑
拓展到高维度 α ( q , k i ) \alpha(q, k_i) α ( q , k i )
Additive Attention: 可学参数 W k ∈ R h × k W_k \in R^{h\times k} W k ∈ R h × k W q ∈ R h × q W_q \in R^{h\times q} W q ∈ R h × q v ∈ R h v \in R^{h} v ∈ R h
a ( k , q ) = v T t a n h ( W k k + W q q ) a(k,q) = v^{T}tanh(W_kk + W_qq) a ( k , q ) = v T t anh ( W k k + W q q )
等价于将 kv 合并之后放入一个隐藏大小为 h, 输出大小为 1 的单隐藏层 MLP
也是当 q, k 不一样长的时候最常用的做法
如果 q, k 都是同样长度的
2.Scaled Dot-Product Attention
a ( q , k i ) = < q , k i > / d k a(q,k_i)=<q,k_i>/\sqrt{d_k} a ( q , k i ) =< q , k i > / d k
a ( Q , K ) = Q K T / d a(Q,K)=QK^{T}/\sqrt{d} a ( Q , K ) = Q K T / d
f = s o f t m a x ( a ( Q , K ) ) V f=softmax(a(Q,K))V f = so f t ma x ( a ( Q , K )) V
Q, K, V 是一个矩阵?self-attention 自注意力 f = s o f t m a x ( X X T / d ) ) X f=softmax(XX^{T}/\sqrt d))X f = so f t ma x ( X X T / d )) X
但实际运用会给 X 做不同线性线性变换后再输入
f = s o f t m a x ( X W Q X T W K / d ) ) X W V f=softmax(XW_QX^{T}W_K/\sqrt d))XW_V f = so f t ma x ( X W Q X T W K / d )) X W V
Attention 机制的 seq2seq
翻译的词可能相关于原始句子之中不同的值
原始 seq2seq 只能看到单一词的输入, 虽然有隐藏层, 但长距离丢失信息
encoder 的对每个词的输出作为 key 和 value(key = value)
decoder RNN 对上一个词的输出是 query
attention 的输出和下一个词的 embedding 合并进入 decoder
原始的 seq2seq 相当于是只将上一个词的 state+t-1 时刻的 encoder 输出丢到了 decoder 里面
d e c o d e r ( s t a t e t , e o u t p u t t , o u t p u t t − 1 ) decoder(state_{t}, eoutput_{t}, output_{t-1}) d eco d er ( s t a t e t , eo u tp u t t , o u tp u t t − 1 )
现在拓展其表达力, 认为 decoder 应该获取的不是单单最后一个词的输出, 而是和之前的词输出(更长的上下文)都有点关系, 具体关系用 attention 学习, 以编码器的 output 作为 query key, 获取这个 output 最相关的上下文, 并认为翻译的文本之中也应该有类似的上下文关系
d e c o d e r ( s t a t e t , a t t e n t i o n ( o u t p u t t − 1 , e o u t p u t s , e o u t p u t s ) ) decoder(state_t, attention(output_{t-1}, eoutputs, eoutputs)) d eco d er ( s t a t e t , a tt e n t i o n ( o u tp u t t − 1 , eo u tp u t s , eo u tp u t s ))
tokenizer: sentencepiece
embedding: 专业词, 需要调整 tokenizer, 需要添加词 pair, 需要训练新添加的 embedding, 正常领域 frozen 不动, 加 LoRA/Adapter
自注意力
self-attention
序列长度是 n, 卷积核大小 k
CNN RNN self-attention 计算复杂度 O ( k n d 2 ) O(knd^2) O ( kn d 2 ) O ( n d 2 ) O(nd^2) O ( n d 2 ) O ( n 2 d ) O(n^2d) O ( n 2 d ) 并行度 O ( n ) O(n) O ( n ) O ( 1 ) O(1) O ( 1 ) O ( n ) O(n) O ( n ) 最长路径 O ( n / k ) O(n/k) O ( n / k ) O ( n ) O(n) O ( n ) O ( 1 ) O(1) O ( 1 )
自注意力适合处理长文本
代价: 计算代价 n 2 n^2 n 2
位置编码:
和 CNN, RNN 不同, 自注意力没有记录位置的信息, 位置编码将位置信息注入到输入里
输入 X ∈ R n × d X\in R^{n\times d} X ∈ R n × d
p i , 2 j = s i n ( i 1000 0 2 j / d ) , p i , 2 j + 1 = c o s ( i 1000 0 2 j / d ) p_{i,2j}=sin(\frac{i}{10000^{2j/d}}),p_{i,2j+1}=cos(\frac{i}{10000^{2j/d}}) p i , 2 j = s in ( 1000 0 2 j / d i ) , p i , 2 j + 1 = cos ( 1000 0 2 j / d i )
为什么这么设计
记 ω j = 1 / 1000 0 2 j / d \omega_j = 1/10000^{2j/d} ω j = 1/1000 0 2 j / d p i + δ = R o t a t e M a t r i x ( δ ω j ) × p i , δ p_{i+\delta} = RotateMatrix(\delta \omega_j) \times p_{i,\delta} p i + δ = R o t a t e M a t r i x ( δ ω j ) × p i , δ
所以实际上是相对位置的编码
也就是对于同一个序列 j, 位置 i 有 <i, i+k> 的关系的 pair 始终是一个相同的关系
纯基于(self-)attention
encoder-decoder 架构
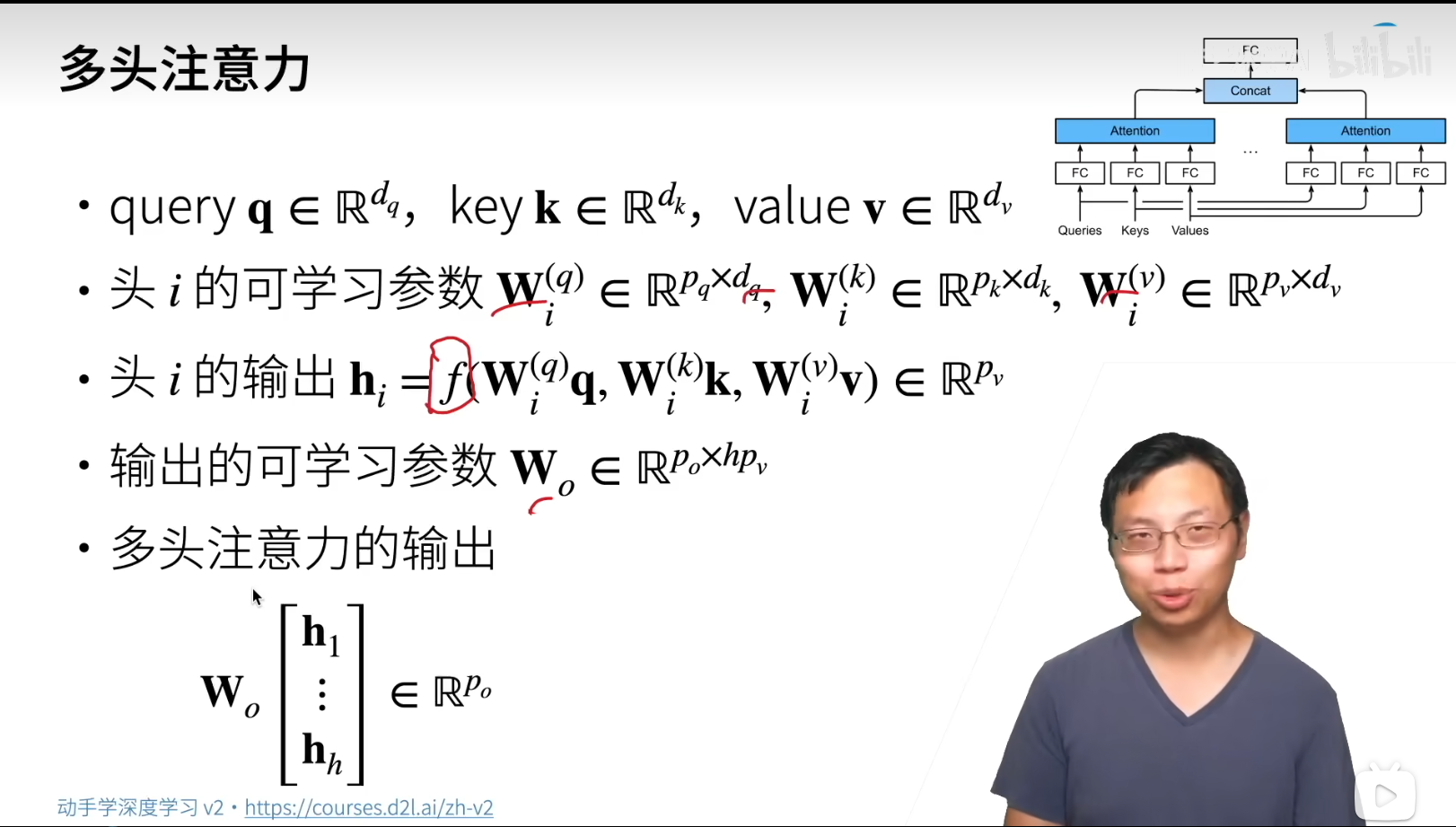
multi-head attention
对同一的 QKV, 希望抽取不同的信息
使用 h 个独特的注意力池化
attention 没有时序信息, encoder 无所谓
decoder 不应该看到不该看到的信息, 需要加入掩码
计算 x i x_i x i
基于位置的前馈网络 Positionwise FFN
将输入形状 ( b , n , d ) (b, n, d) ( b , n , d ) ( b n , d ) (bn, d) ( bn , d )
两层全连接, 添加非线性, 做更多的特征融合
F F N ( x ) = f ( x W 1 T ) W 2 FFN(x)=f(xW^{T}_{1})W_2 FFN ( x ) = f ( x W 1 T ) W 2
Add&Norm: 残差+归一化
编码器的输出 y_1, ... y_n
作为解码器之中第 i 个 transformer 块之中多头注意力的 key 和 value
预测, t+1 输出
decoder 输入前 t 个预测值作为 key, value, 第 t 个预测还作为 query
Bert
nlp 的迁移学习
使用 pretrain 的模型抽取词句的特征
不更新 pretrain 模型
问题: 1. 做 embedding 的话忽略了时序信息 2.后续模型还要自己设计, 只有 embedding 似乎没有很大用处
Bert: 能不能也通过改最后一层复用?
只有编码器的 transformer
对输入的修改:
每个样本都是一个句子对
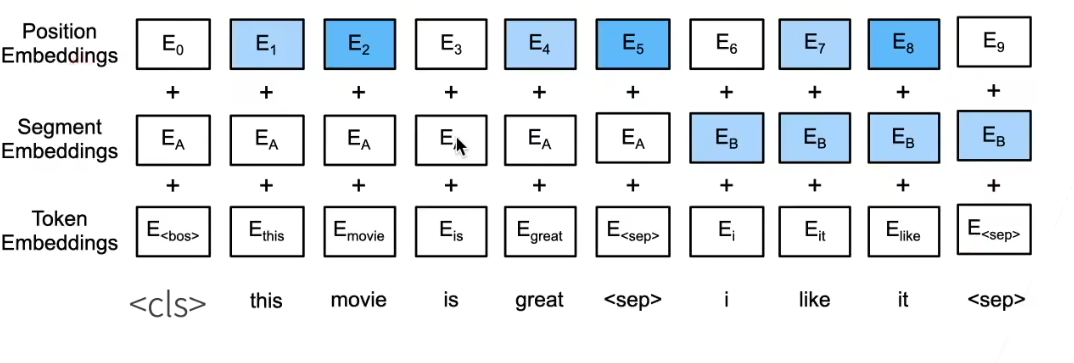
加入额外的片段嵌入
位置编码可学习
三种 embedding: position, segment, token
通用的任务?
任务 1: 带掩码的语言模型
带掩码的语言模型每次随机(15%概率)将一些词元换成 <mask>
微调任务之中不出现 <mask>
微调任务是没有 <mask> 标记的,如果设计方案是:只要 token 被选中 mask 处理,并且处理方法只要一种就是 token 别替换为 <mask>,这样的话,预训练任务和微调任务的数据太不一样了。BERT 的 3 种 mask 方法,可以使得,有 20%情况,句子对没有 <mask> 标记。
我理解的说白了就是不仅仅是因为看到了 <mask> 才去找上下文的信息,而是一直保持联系上下文的“习惯”
80%下, 变成 <mask>
10%, 随机(错误的结果)
10%, 原有(正确的结果)
10%的词会被替换成随机词元的原因: 作者在论文中谈到了采取上面的 mask 策略的好处。大致是说采用上面的策略后,Transformer encoder 就不知道会让其预测哪个单词,或者说不知道哪个单词会被随机单词给替换掉,那么它就不得不保持每个输入 token 的一个上下文的表征分布(a distributional contextual representation)。也就是说如果模型学习到了要预测的单词是什么,那么就会丢失对上下文信息的学习,而如果模型训练过程中无法学习到哪个单词会被预测,那么就必须通过学习上下文的信息来判断出需要预测的单词,这样的模型才具有对句子的特征表示能力。另外,由于随机替换相对句子中所有 tokens 的发生概率只有 1.5%(即 15%的 10%),所以并不会影响到模型的语言理解能力。(网上复制的,这是我找到的可以说服我自己的一个解释)
任务 2: 下一句子预测:
训练样本之中, 50%选择相邻句子对, 50%选择随机句子对
微调 Bert
bert 对每一个次元返回抽取了上下文信息的特征向量
不同的任务取不同的特征
句子分类, 将 <cls> 对应的向量输入到 MLP 分类
命名实体识别, 识别一个词元是不是命名实体, 例如人名机构位置
把每一个非特殊词元(不是 <cls><sep>...)放进 MLP 分类
问题回答: 给定一个问题和描述文字, 找一个片段作为回答
实用机器学习
不讲模型, 讲数据
知识积累, 学会读论��文, 经典论文需要读懂每一句话
结合代码了解细节
对读过的论文做整理